
接着上一篇planning模块(2)-参考线的生成 我们继续解释GetRouteSegments函数,上一篇已经解释了CanDriveFrom函数,它是在判断从GetNeighborPassages函数获取到的drive_passages,是否可以从当前自车位置开到drive_passages中所要切换的车道上.
!segments.CanDriveFrom(adc_waypoint_) const auto last_waypoint = segments.LastWaypoint();
if (!ExtendSegments(segments, sl.s() - backward_length,
sl.s() + forward_length, &route_segments->back())) {
AERROR << "Failed to extend segments with s=" << sl.s()
<< ", backward: " << backward_length
<< ", forward: " << forward_length;
return false;
}GetRouteSegments函数
ExtendSegments函数
我们接下来介绍ExtendSegments函数,首先通过GetNeighborPassages获取到的drive_passages里面应该有两个,如果当前自车位置如下:
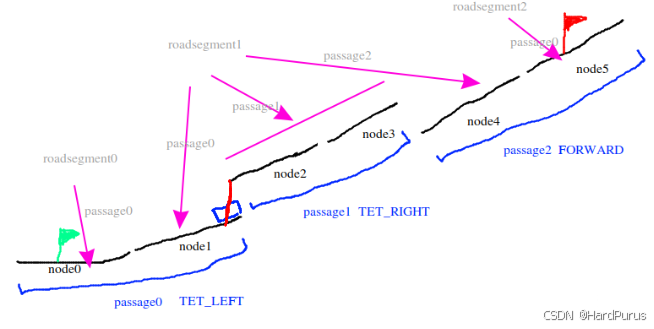
drive_passages包含了roadsegment1中的passage0和passage1
当index是passage0时
const auto last_waypoint = segments.LastWaypoint();获取到的last_waypoint就是node1的相关车道信息
ExtendSegments(segments, sl.s() - backward_length,
sl.s() + forward_length, &route_segments->back())假如从配置中获取到的back ward_length:50和forward_length:120
if (start_s < 0) {
const auto& first_segment = *segments.begin();
auto lane = first_segment.lane;
double s = first_segment.start_s;
double extend_s = -start_s;
std::vector<hdmap::LaneSegment> extended_lane_segments;
while (extend_s > kRouteEpsilon) {
if (s <= kRouteEpsilon) {
lane = GetRoutePredecessor(lane);
if (lane == nullptr ||
unique_lanes.find(lane->id().id()) != unique_lanes.end()) {
break;
}
s = lane->total_length();
} else {
const double length = std::min(s, extend_s);
extended_lane_segments.emplace_back(lane, s - length, s);
extend_s -= length;
s -= length;
unique_lanes.insert(lane->id().id());
}
}
truncated_segments->insert(truncated_segments->begin(),
extended_lane_segments.rbegin(),
extended_lane_segments.rend());
}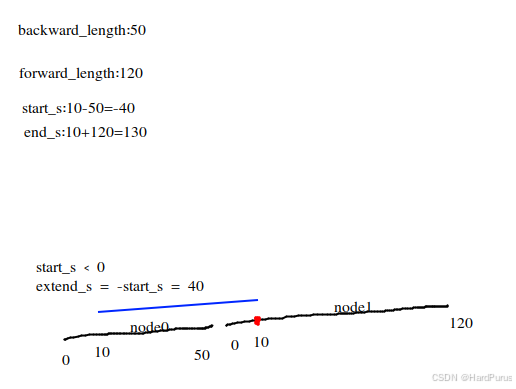
对于上面的代码的逻辑,用图示的例子来说明,红色位置是当前自车所匹配到的在参考路线上的位置
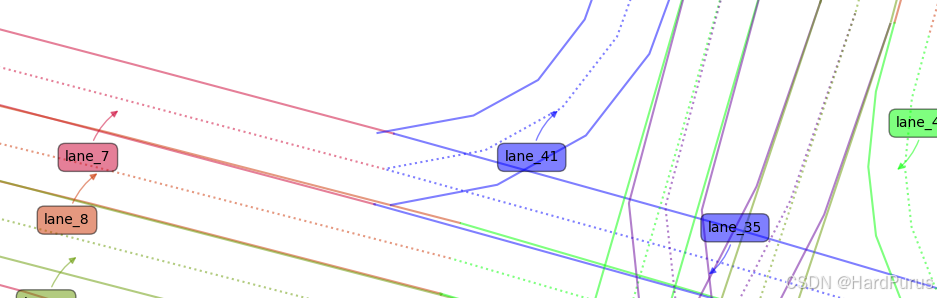
由于node1节点从自车位置向后的距离只有10m不足50m,所以需要通过GetRoutePredecessor函数从map拓扑图中获取到node1的驶入邻边,比如获取到的lane是node0(需要注意GetRoutePredecessor获取到的驶入邻边是非换道的驶入邻边,不包含换道驶入的边)
比如lane_7可以从lane_41和lane_35两条非换道车道驶入
那么此时s = first_segment.start_s=0,因为是node1的start_s
extend_s是40
现在进入while循环,由于node1从自车位置10m处向后的距离不足50m,所以需要通过GetRoutePredecessor函数获取node1的驶入邻边node0,它的长度是50,所以此时s为50
继续while循环,由于此时的s为50,所以会走进else的逻辑中
length = std::min(50, 40) = 40
extended_lane_segments.emplace_back(node0, 50 - 40 = 10, 50)
extend_s = 40 - 40 = 0
s = 50 - 40 = 10
因为此时extend_s为0所以while循环不再继续执行,此时truncated_segments使用extended_lane_segments赋值
bool found_loop = false;
double router_s = 0;
for (const auto& lane_segment : segments) {
const double adjusted_start_s = std::max(
start_s - router_s + lane_segment.start_s, lane_segment.start_s);
const double adjusted_end_s =
std::min(end_s - router_s + lane_segment.start_s, lane_segment.end_s);
if (adjusted_start_s < adjusted_end_s) {
if (!truncated_segments->empty() &&
truncated_segments->back().lane->id().id() ==
lane_segment.lane->id().id()) {
truncated_segments->back().end_s = adjusted_end_s;
} else if (unique_lanes.find(lane_segment.lane->id().id()) ==
unique_lanes.end()) {
truncated_segments->emplace_back(lane_segment.lane, adjusted_start_s,
adjusted_end_s);
unique_lanes.insert(lane_segment.lane->id().id());
} else {
found_loop = true;
break;
}
}
router_s += (lane_segment.end_s - lane_segment.start_s);
if (router_s > end_s) {
break;
}
}
if (found_loop) {
return true;
}
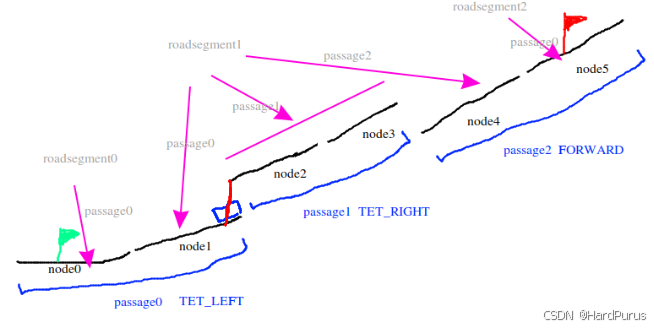
接下来继续分析上面的代码逻辑,因为当前遍历的index是自车所在passage,所以对应图示是roadsegment1 passage0,所以segments包含node1车道
router_s = 0
start_s = -40
lane_segment.start_s=0 (此时的lane_segment是node1)
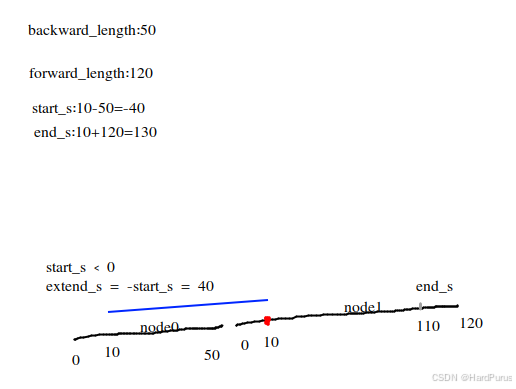
lane_segment.end_s=110
adjusted_start_s = std::max(-40 - 0 + 0, 0) = 0
adjusted_end_s = std::min(130 - 0 + 0, 110) = 110
因为此时truncated_segments->back()存的车道是node0和当前车道node1不是一条车道,并且unique_lanes只有node0,所以将node1加入truncated_segments.
truncated_segments目前包含
(node0, 10, 50)
(node1, 0, 110)
if (router_s < end_s && !truncated_segments->empty()) {
auto& back = truncated_segments->back();
if (back.lane->total_length() > back.end_s) {
double origin_end_s = back.end_s;
back.end_s =
std::min(back.end_s + end_s - router_s, back.lane->total_length());
router_s += back.end_s - origin_end_s;
}
}
auto last_lane = segments.back().lane;
while (router_s < end_s - kRouteEpsilon) {
last_lane = GetRouteSuccessor(last_lane);
if (last_lane == nullptr ||
unique_lanes.find(last_lane->id().id()) != unique_lanes.end()) {
break;
}
const double length = std::min(end_s - router_s, last_lane->total_length());
truncated_segments->emplace_back(last_lane, 0, length);
unique_lanes.insert(last_lane->id().id());
router_s += length;
}继续看上面的逻辑
目前router_s = 110, end_s = 130, router_s < end_s并且truncated_segments不为空
auto& back = truncated_segments->back()获取到的是(node1, 0, 110)
back.lane->total_length()的长度是120, back.end_s是110
origin_end_s = 110
back.end_s = std::min(110 + 130 - 110, 120) = 120
在这里把node1可行驶区间的end_s修改为了120
router_s = 110 + 120 - 110 = 120
auto last_lane = segments.back().lane;获取到是(node1, 0, 120)
此时router_s为120, end_s为130 router_s < end_s符合while循环条件,说明此时自车前方的参考线长度还没有达到我们要求的130m,但是此时node1这条车道的长度已经不够了,所以需要通过GetRouteSuccessor函数获取到node1所有驶出的非换道邻边,因为是非换道邻边所以通过GetRouteSuccessor函数获取的车道为空,而不是node2,node2是换道边,所以while循环会终止
此时truncated_segments中包含:
(node0, 10, 50)
(node1, 0, 120)
if (route_segments->back().IsWaypointOnSegment(last_waypoint)) {
route_segments->back().SetRouteEndWaypoint(last_waypoint);
}
route_segments->back().SetCanExit(passage.can_exit());
route_segments->back().SetNextAction(passage.change_lane_type());
const std::string route_segment_id = absl::StrCat(road_index, "_", index);
route_segments->back().SetId(route_segment_id);
route_segments->back().SetStopForDestination(stop_for_destination_);
if (index == passage_index) {
route_segments->back().SetIsOnSegment(true);
route_segments->back().SetPreviousAction(routing::FORWARD);
} else if (sl.l() > 0) {
route_segments->back().SetPreviousAction(routing::RIGHT);
} else {
route_segments->back().SetPreviousAction(routing::LEFT);
}上面代码逻辑是设置一些属性
上面是index为当前自车所在的passage,按照下图就是passage0,当index为passage1时的处理逻辑
与index为passage0时的处理逻辑类似,只不过参考线是以换道边上的自车投影点扩展的,并且扩展的是换道边的驶入驶出邻边.
如果按照上图,最后route_segments的size为2,一个是当前车道前后的扩展参考线,一个是换道边投影点的前后扩展参考线
void LaneFollowMap::UpdateRouteSegmentsLaneIds(
const std::list<hdmap::RouteSegments>* route_segments) {
route_segments_lane_ids_.clear();
for (auto& route_seg : *route_segments) {
for (auto& lane_seg : route_seg) {
if (nullptr == lane_seg.lane) {
continue;
}
route_segments_lane_ids_.insert(lane_seg.lane->id().id());
}
}
}将有效的lane id存入route_segments_lane_ids_中
到此GetRouteSegments函数就介绍完了
PrioritizeChangeLane函数
void ReferenceLineProvider::PrioritizeChangeLane(
std::list<hdmap::RouteSegments>* route_segments) {
CHECK_NOTNULL(route_segments);
auto iter = route_segments->begin();
while (iter != route_segments->end()) {
if (!iter->IsOnSegment()) {
route_segments->splice(route_segments->begin(), *route_segments, iter);
break;
}
++iter;
}
}iter->IsOnSegment()这个函数获取到的值是在上面设置一些属性那里设置的,只有route_segment是自车所在车道的扩展参考线时,才会被设置为true.
也就是说PrioritizeChangeLane函数的逻辑是针对换道边的扩展参考线的,它的作用是把换道边的扩展参考线的route_segment移动到route_segments链表的最前面,也就是说这里的策略是换道的扩展参考线优先级更高,这个后面我们在决策的部分会看到.
至此,CreateRouteSegments函数就介绍完了.