
planning模块(7)-参考线的平滑上一篇已经介绍了SmoothRouteSegment函数的内容,如果存在换道的情况会生成两条平滑参考线,一条是自车所在方向,一条是所要切换的车道方向,平滑前会分别调用SmoothRouteSegment函数进行参考线平滑.
如果是新的算路指令,当调用SmoothRouteSegment平滑成功后会进入下面逻辑
{
common::SLPoint sl;
if (!reference_lines->back().XYToSL(
vehicle_state.heading(),
common::math::Vec2d(vehicle_state.x(), vehicle_state.y()),
&sl)) {
AWARN << "Failed to project point: {" << vehicle_state.x() << ","
<< vehicle_state.y() << "} to stitched reference line";
}
Shrink(sl, &reference_lines->back(), &(*iter));
++iter;
}
下面就来介绍这个逻辑的作用
reference_lines->back().XYToSL(
vehicle_state.heading(),
common::math::Vec2d(vehicle_state.x(), vehicle_state.y()),
&sl)
是在获取当前自车位置,在平滑后参考线上横纵距离
Shrink函数
bool ReferenceLineProvider::Shrink(const common::SLPoint& sl,
ReferenceLine* reference_line,
RouteSegments* segments)
sl:根据当前自车位置,在平滑后参考线上获取到的横纵距离
reference_line:平滑后的参考线数据
segments:平滑前的RouteSegments数据
if (sl.s() > planning::FLAGS_look_backward_distance * 1.5) {
ADEBUG << "reference line back side is " << sl.s()
<< ", shrink reference line: origin length: "
<< reference_line->Length();
new_backward_distance = planning::FLAGS_look_backward_distance;
need_shrink = true;
}
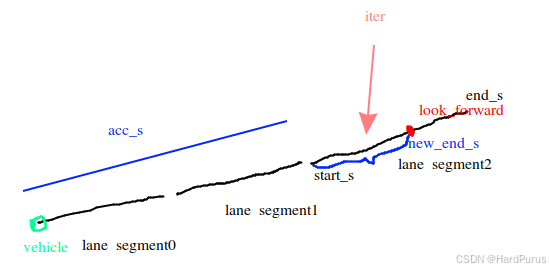
如果自车在平滑后的参考线上的投影点的纵向距离大于阈值,说明自车后方生成了较长的参考线,需要进行裁剪
// check heading
const auto index = reference_line->GetNearestReferenceIndex(sl.s());
const auto& ref_points = reference_line->reference_points();
const double cur_heading = ref_points[index].heading();
auto last_index = index;
while (last_index < ref_points.size() &&
std::fabs(AngleDiff(cur_heading, ref_points[last_index].heading())) <
FLAGS_reference_line_max_forward_heading_diff) {
++last_index;
}
--last_index;
if (last_index != ref_points.size() - 1) {
need_shrink = true;
common::SLPoint forward_sl;
reference_line->XYToSL(ref_points[last_index], &forward_sl);
new_forward_distance = forward_sl.s() - sl.s();
}
GetNearestReferenceIndex函数主要是根据当前自车位置投影点的s值,在平滑后的参考线上找到第一个不小于s值的路径点索引.
然后根据路径点索引,获取到路径点,再获取到以路径点为起点的路径段的朝向,如果这个车道段的朝向与前方的路径段朝向相差的角度小于阈值,则认为方向变化平缓,可以继续往前使用,如果角度差大于阈值,说明存在弯道,循环就会停止.
if (last_index != ref_points.size() - 1) {
need_shrink = true;
common::SLPoint forward_sl;
reference_line->XYToSL(ref_points[last_index], &forward_sl);
new_forward_distance = forward_sl.s() - sl.s();
}
如果last_index != ref_points.size() - 1,说明存在弯路,这时需要裁剪,new_forward_distance是自车前方参考线应该裁剪的距离.
// check backward heading
last_index = index;
while (last_index > 0 &&
abs(AngleDiff(cur_heading, ref_points[last_index].heading())) <
FLAGS_reference_line_max_backward_heading_diff) {
--last_index;
}
if (last_index != 0) {
need_shrink = true;
common::SLPoint backward_sl;
reference_line->XYToSL(ref_points[last_index], &backward_sl);
new_backward_distance = sl.s() - backward_sl.s();
}
上面逻辑是检查自车后方参考线之间的角度差是否过大,如果过大说明有不合适的参考线,需要进行裁剪,new_backward_distance是裁剪后,自车后方应该保留的参考线长度.
if (need_shrink) {
if (!reference_line->Segment(sl.s(), new_backward_distance,
new_forward_distance)) {
AWARN << "Failed to shrink reference line";
}
if (!segments->Shrink(sl.s(), new_backward_distance,
new_forward_distance)) {
AWARN << "Failed to shrink route segment";
}
}
reference_line->Segment函数的作用:就是根据最新的new_forward_distance和new_backward_distance裁剪reference_points/裁剪map_path.
segments->Shrink函数的作用:
1.删除 s - look_backward 之前的车道段
2.从车辆所在车道开始查找 waypoint 所在 lane segment
3.删除 look_forward 之后的车道段
double acc_s = 0.0;
auto iter = begin();
while (iter != end() && acc_s + iter->Length() < s - look_backward) {
acc_s += iter->Length();
++iter;
}
从头开始累积lane segment的长度acc_s,当:
acc_s + 当前segment长度 < s - look_backward
说明当前segment在自车后方要生成的参考线长度范围之外要删掉
acc_s <= s - look_backward <= acc_s + segment.length
直到找到“包含 backward 起始点”的 segment
iter->start_s =
std::max(iter->start_s, s - look_backward - acc_s + iter->start_s);
比较s - look_backward在当前这个segment上的纵向距离和这个segment起点的纵向距离,也就是调整这个segment可行驶区间的起点位置.
if (iter->Length() < kSegmentationEpsilon) {
++iter;
}
erase(begin(), iter);
删除不在范围内的所有lane segment
iter = begin();
acc_s = 0.0;
while (iter != end() && !WithinLaneSegment(*iter, waypoint)) {
++iter;
}
从新的lane segment开始遍历,判断自车的waypoint 是否能匹配到某个segment 上
当匹配到时,iter指向车辆所在 lane segment
acc_s = iter->end_s - waypoint.s
计算自车所在的lane segment剩下的可行驶区间距离
acc_s = iter->end_s - waypoint.s;
if (acc_s >= look_forward) {
iter->end_s = waypoint.s + look_forward;
++iter;
erase(iter, end());
return true;
}
调整自车所在lane segment的可行驶区间终点,并删除之后的所有lane segment.
++iter;
while (iter != end() && acc_s + iter->Length() < look_forward) {
acc_s += iter->Length();
++iter;
}
if (iter == end()) {
return true;
}
iter->end_s = std::min(iter->end_s, look_forward - acc_s + iter->start_s);
erase(iter + 1, end());
如果没有满足acc_s >= look_forward,则继续累积后面的lane segment直到超过 look_forward.
当acc_s + iter->Length() \ge look_forward时,acc_s的长度还小于look_forward,当加上iter->Length()时才大于等于,所以look_forward是在iter所指向的lane segment上,look_forward - acc_s + iter->start_s是在计算在iter所指向的lane segment上look_forward的纵向距离是多少,然后取可行驶区间的终点与look_forward的纵向距离最小值,就是这个lane segment最后的可行驶区间的终点位置.
然后将之后的lane segment全部删除.
到这Shrink函数就介绍完了,主要就是对平滑后的参考线,再做进一步的裁剪,主要保留方向连续的参考线部分,有大转弯的部分就删除掉了.
else { // stitching reference line
for (auto iter = segments->begin(); iter != segments->end();) {
reference_lines->emplace_back();
if (!ExtendReferenceLine(vehicle_state, &(*iter),
&reference_lines->back())) {
AERROR << "Failed to extend reference line";
reference_lines->pop_back();
iter = segments->erase(iter);
} else {
++iter;
}
}
}
当没有下发新指令时
ExtendReferenceLine函数
auto prev_segment = route_segments_.begin();
auto prev_ref = reference_lines_.begin();
prev_segment:是上一帧生成的route_segments
prev_ref:是上一帧生成的reference_lines
route_segments_和reference_lines_是通过UpdateReferenceLine函数进行更新的,这个下面会进行介绍.
while (prev_segment != route_segments_.end()) {
if (prev_segment->IsConnectedSegment(*segments)) {
break;
}
++prev_segment;
++prev_ref;
}
判断当前的route_segment与上一帧的route_segment是否有连接
if (prev_segment == route_segments_.end()) {
if (!route_segments_.empty() && segments->IsOnSegment()) {
AWARN << "Current route segment is not connected with previous route "
"segment";
}
return SmoothRouteSegment(*segments, reference_line);
}
如果当前route_segment就是自车所在的route_segment,并且当前route_segment与上一帧的route_segment没有连接关系,说明定位发生了跳变或切换车道了,这个时候就会使用当前的route_segment数据,平滑出一条新的参考线.
如果当前route_segment与上一帧的route_segment存在连接关系
prev_segment->GetProjection(vec2d, state.heading(), &sl_point,
&waypoint)
就会获取当前车辆位置在上一帧route_segment上的waypoint数据和横纵向距离
const double prev_segment_length = RouteSegments::Length(*prev_segment);
const double remain_s = prev_segment_length - sl_point.s();
const double look_forward_required_distance =
planning::PncMapBase::LookForwardDistance(state.linear_velocity());
if (remain_s > look_forward_required_distance) {
*segments = *prev_segment;
segments->SetProperties(segment_properties);
*reference_line = *prev_ref;
ADEBUG << "Reference line remain " << remain_s
<< ", which is more than required " << look_forward_required_distance
<< " and no need to extend";
return true;
}
remain_s:是上一帧route_segment的长度减去当前自车在上一帧route_segment投影点的纵向位置,等于上一帧route_segment剩下可行驶区间的距离,如果这个距离比look_forward_required_distance大,就不需要再去延伸参考线长度了,直接复用上一帧的参考线.
double future_start_s =
std::max(sl_point.s(), prev_segment_length -
FLAGS_reference_line_stitch_overlap_distance);
double future_end_s =
prev_segment_length + FLAGS_look_forward_extend_distance;
重新计算自车前后要生成参考线的区间
current_pnc_map_->ExtendSegments(*prev_segment, future_start_s,
future_end_s, &shifted_segments)
按照上面的参考线区间扩展route_segment,ExtendSegments函数前面已经介绍过ExtendSegments函数.
if (prev_segment->IsWaypointOnSegment(shifted_segments.LastWaypoint())) {
*segments = *prev_segment;
segments->SetProperties(segment_properties);
*reference_line = *prev_ref;
ADEBUG << "Could not further extend reference line";
return true;
}
如果扩展后,发现新的route_segment的终点的lane waypoint依旧在上一帧的route segment内,则直接返回上一帧的参考线,说明此时map数据无法再进行扩展了.
SmoothPrefixedReferenceLine函数
SmoothPrefixedReferenceLine(*prev_ref, new_ref, reference_line)
与SmoothReferenceLine函数相似,用于平滑参考线,同样是采样获取锚点,然后平滑参考线,不同的是SmoothPrefixedReferenceLine函数多了一个参数prefix_ref是上一帧参考线,并且多了下面逻辑
for (auto& point : anchor_points) {
common::SLPoint sl_point;
if (!prefix_ref.XYToSL(point.path_point, &sl_point)) {
continue;
}
if (sl_point.s() < 0 || sl_point.s() > prefix_ref.Length()) {
continue;
}
auto prefix_ref_point = prefix_ref.GetNearestReferencePoint(sl_point.s());
point.path_point.set_x(prefix_ref_point.x());
point.path_point.set_y(prefix_ref_point.y());
point.path_point.set_z(0.0);
point.path_point.set_theta(prefix_ref_point.heading());
point.longitudinal_bound = 1e-6;
point.lateral_bound = 1e-6;
point.enforced = true;
break;
}
在新参考线平滑前,把新参考线平滑前的第一个锚点坐标,设置为第一个锚点在上一帧参考线上的投影点的坐标,这样平滑后的新参考线就能与上一帧的参考线连接起来.
reference_line->Stitch函数
主要作用:
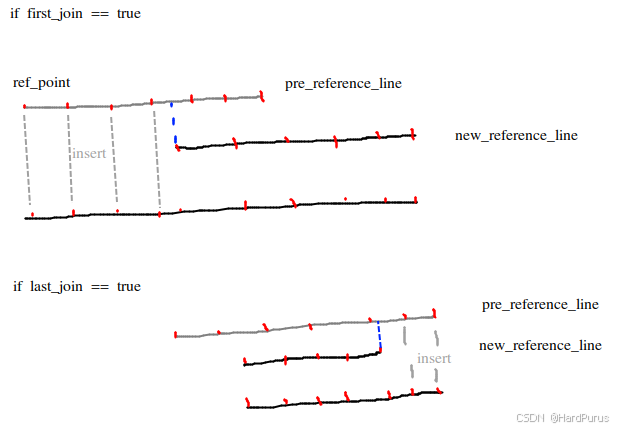
当新参考线的第一个参考点在上一帧参考线上的投影点,在上一帧参考线的长度范围内,则将投影点之前的上一帧参考点插入到新参考线参考点的前面
当新参考线的最后一个参考点在上一帧参考线上的投影点,在上一帧参考线的长度范围内,则将投影点之后的上一帧参考点插入到新参考线参考点的后面
然后构成新参考线的新的reference_points_,赋值给map_path_.
shifted_segments.Stitch函数
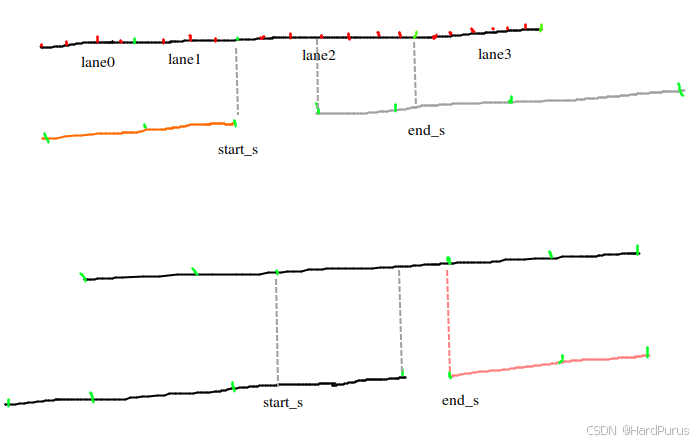
这个函数是针对lane segment的拼接,上图绿色点分割的是不同的lane,黑色是上一帧route segment,灰色是新参考线的route segment.
当新参考线的第一个lane waypoint的位置是在上一帧参考线的某一lane waypoint的可行驶区间范围内,就会根据上一帧参考线的这个lane waypoint的可行驶区间来调整新参考线的第一个lane waypoint的可行驶区间,并且将上一帧参考线的这个lane waypoint之前的所有lane waypoint插入到新的参考线的route segment中,如上图桔黄色
当新参考线的最后一个lane waypoint的位置是在上一帧参考线的某一lane waypoint的可行驶区间范围内,就会根据上一帧参考线的这个lane waypoint的可行驶区间来调整新参考线的最后一个lane waypoint的可行驶区间,并且将上一帧参考线的这个lane waypoint之后的所有lane waypoint插入到新的参考线的route segment中,如上图桔黄色
无论是reference_line->Stitch函数还是shifted_segments.Stitch函数都是为了,当前参考线与上一帧参考线衔接的更加平滑.
Shrink(sl, reference_line, segments)
最后,对新的参考线进行裁剪
到这ExtendReferenceLine函数就分析完了,从而CreateReferenceLine函数也分析完了.
UpdateReferenceLine函数
if (reference_lines_.size() != reference_lines.size()) {
reference_lines_ = reference_lines;
route_segments_ = route_segments;
}
如果参考线size不同,直接更新缓存
else {
auto segment_iter = route_segments.begin();
auto internal_iter = reference_lines_.begin();
auto internal_segment_iter = route_segments_.begin();
for (auto iter = reference_lines.begin();
iter != reference_lines.end() &&
segment_iter != route_segments.end() &&
internal_iter != reference_lines_.end() &&
internal_segment_iter != route_segments_.end();
++iter, ++segment_iter, ++internal_iter, ++internal_segment_iter) {
if (iter->reference_points().empty()) {
*internal_iter = *iter;
*internal_segment_iter = *segment_iter;
continue;
}
if (common::util::SamePointXY(
iter->reference_points().front(),
internal_iter->reference_points().front()) &&
common::util::SamePointXY(iter->reference_points().back(),
internal_iter->reference_points().back()) &&
std::fabs(iter->Length() - internal_iter->Length()) <
common::math::kMathEpsilon) {
continue;
}
*internal_iter = *iter;
*internal_segment_iter = *segment_iter;
}
}
如果参考线size相同,则比较当前参考线与缓存中参考线的第一个参考点,最后一个参考点,和长度.其中之一不同则更新缓存.
reference_line_history_.push(reference_lines_);
route_segments_history_.push(route_segments_);
static constexpr int kMaxHistoryNum = 3;
if (reference_line_history_.size() > kMaxHistoryNum) {
reference_line_history_.pop();
route_segments_history_.pop();
}
更新reference_line_history_/route_segments_history_,如果reference_line_history_的size大于阈值默认是3,则删除旧的历史数据.
到这UpdateReferenceLine函数就分析完了,整个参考线相关的内容也就更新完了.