
按照task的执行顺序,SPEED_HEURISTIC_OPTIMIZER task执行完会接着执行SPEED_DECIDER task
common::Status SpeedDecider::Execute(Frame* frame,
ReferenceLineInfo* reference_line_info) {
MakeObjectDecision函数
if (!MakeObjectDecision(reference_line_info->speed_data(),
reference_line_info->path_decision())
.ok()) {
const std::string msg = "Get object decision by speed profile failed.";
AERROR << msg;
return Status(ErrorCode::PLANNING_ERROR, msg);
}
for (const auto* obstacle : path_decision->obstacles().Items()) {
auto* mutable_obstacle = path_decision->Find(obstacle->Id());
const auto& boundary = mutable_obstacle->path_st_boundary();
if (boundary.IsEmpty() || boundary.max_s() < 0.0 ||
boundary.max_t() < 0.0 ||
boundary.min_t() >= speed_profile.back().t()) {
AppendIgnoreDecision(mutable_obstacle);
continue;
}
检查障碍物的时空边界,如果满足以下任一条件就忽略:
- 边界为空(无时空交集)
- 在车辆后方(s < 0)
- 出现在过去(t < 0)
- 在规划时间范围外出现
void SpeedDecider::AppendIgnoreDecision(Obstacle* obstacle) const {
ObjectDecisionType ignore_decision;
ignore_decision.mutable_ignore();
if (!obstacle->HasLongitudinalDecision()) {
obstacle->AddLongitudinalDecision("dp_st_graph", ignore_decision);
}
if (!obstacle->HasLateralDecision()) {
obstacle->AddLateralDecision("dp_st_graph", ignore_decision);
}
}
给障碍物添加"忽略"决策
- 创建忽略决策对象
- 如果没有纵向决策,添加纵向忽略
- 如果没有横向决策,添加横向忽略
- 标签为 "dp_st_graph"
void Obstacle::AddLongitudinalDecision(const std::string& decider_tag,
const ObjectDecisionType& decision) {
添加纵向决策
void Obstacle::AddLateralDecision(const std::string& decider_tag,
const ObjectDecisionType& decision) {
添加横向决策
ObjectDecisionType Obstacle::MergeLongitudinalDecision(
const ObjectDecisionType& lhs, const ObjectDecisionType& rhs) {
合并纵向决策
ObjectDecisionType Obstacle::MergeLateralDecision(
const ObjectDecisionType& lhs, const ObjectDecisionType& rhs)
合并横向决策
auto location = GetSTLocation(path_decision, speed_profile, boundary);
GetSTLocation函数
用于判断速度曲线(Speed Profile)与障碍物ST边界的相对位置关系
- ABOVE:速度曲线在 ST 边界上方(安全,不会碰撞)
- BELOW:速度曲线在 ST 边界下方(危险,可能碰撞)
- CROSS:速度曲线与 ST 边界交叉(危险,会碰撞)
if (st_boundary.IsEmpty()) {
return BELOW;
}
如果ST边界为空(障碍物不在路径上),直接返回BELOW
- 表示速度曲线在边界"下方"(实际上没有边界)
- 这种障碍物不需要特殊处理
STLocation st_location = BELOW;
bool st_position_set = false;
const double start_t = st_boundary.min_t();
const double end_t = st_boundary.max_t();
- st_location :存储最终的位置关系,初始为 BELOW
- st_position_set:标记是否已经确定了位置关系
- start_t / end_t:ST边界的时间范围
for (size_t i = 0; i + 1 < speed_profile.size(); ++i) {
const STPoint curr_st(speed_profile[i].s(), speed_profile[i].t());
const STPoint next_st(speed_profile[i + 1].s(), speed_profile[i + 1].t());
遍历速度曲线的每一段线段
- curr_st:当前时间点的位置
- next_st:下一个时间点的位置
- 两点构成一条速度曲线线段
if (curr_st.t() < start_t && next_st.t() < start_t) {
continue; // 速度曲线段在边界开始之前,跳过
}
if (curr_st.t() > end_t) {
break; // 速度曲线段在边界结束之后,退出循环
}
只检查与ST边界时间范围重叠的速度曲线段
- 如果线段完全在边界之前 → 跳过
- 如果线段在边界之后 → 退出(后续都不用检查)
if (!FLAGS_use_st_drivable_boundary) {
// 第106行:创建速度曲线线段
common::math::LineSegment2d speed_line(curr_st, next_st);
// 第107行:检查是否与 ST 边界交叉
if (st_boundary.HasOverlap(speed_line)) {
ADEBUG << "speed profile cross st_boundaries.";
// 第109行:标记为交叉
st_location = CROSS;
线段与ST边界是否交叉的判断方法在planning模块(15)-速度动态规划优化算法(path time heuristic optimizer) 介绍过
CheckKeepClearCrossable函数
bool SpeedDecider::CheckKeepClearCrossable(
const PathDecision* const path_decision,
const SpeedData& speed_profile,
const STBoundary& keep_clear_st_boundary) const
判断车辆是否可以穿越KEEP_CLEAR区域
const auto& last_speed_point = speed_profile.back();
double last_speed_point_v = 0.0;
- last_speed_point:速度曲线的最后一个点(规划终点)
- last_speed_point_v:最后一个点的速度,初始化为0.0
if (last_speed_point.has_v()) {
last_speed_point_v = last_speed_point.v();
}
直接使用已有的速度值v()
else {
const size_t len = speed_profile.size();
if (len > 1) {
const auto& last_2nd_speed_point = speed_profile[len - 2]; // 倒数第二个点
// 用差分计算速度:v = Δs / Δt
last_speed_point_v = (last_speed_point.s() - last_2nd_speed_point.s()) /
(last_speed_point.t() - last_2nd_speed_point.t());
}
}
使用倒数第二个点和最后一个点计算平均速度
if (last_speed_point.s() <= keep_clear_st_boundary.max_s() &&
last_speed_point_v < config_.keep_clear_last_point_speed()) {
keep_clear_crossable = false;
}
车辆规划的终点还在 KEEP_CLEAR 区域内或之前
车辆在规划终点几乎静止
同时,满足这两个条件时,表示禁停区不可以穿越
if (st_boundary.boundary_type() ==
STBoundary::BoundaryType::KEEP_CLEAR) {
if (!CheckKeepClearCrossable(path_decision, speed_profile,
st_boundary)) {
st_location = BELOW;
}
}
- 如果发现交叉,但区域是KEEP_CLEAR且不可穿越
- 将 st_location从CROSS改回BELOW
- 表示车辆应该在边界下方(即停车等待,不穿越)
if (!st_position_set) {
if (start_t < next_st.t() && curr_st.t() < end_t) {
STPoint bd_point_front = st_boundary.upper_points().front();
double side = common::math::CrossProd(bd_point_front, curr_st, next_st);
st_location = side < 0.0 ? ABOVE : BELOW;
st_position_set = true;
}
}
判断速度曲线在ST边界的上方还是下方
叉积side < 0,说明曲线段在障碍物ST边界上方,否则说明曲线段在障碍物ST边界下方
bool SpeedDecider::CheckKeepClearBlocked(
const PathDecision* const path_decision,
const Obstacle& keep_clear_obstacle) const
判断 KEEP_CLEAR 区域(如路口)前方是否有其他障碍物阻挡
返回值 :
- true :KEEP_CLEAR区域被阻挡(不能进入)
- false :KEEP_CLEAR区域畅通(可以进入)
for (const auto* obstacle : path_decision->obstacles().Items()) {
if (obstacle->Id() == keep_clear_obstacle.Id()) {
continue; // 跳过 KEEP_CLEAR 障碍物自身
}
遍历路径决策中的所有障碍物,跳过自身,看是否有其他障碍物阻挡
const double obstacle_start_s = obstacle->PerceptionSLBoundary().start_s();
const double adc_length =
VehicleConfigHelper::GetConfig().vehicle_param().length();
const double distance =
obstacle_start_s - keep_clear_obstacle.PerceptionSLBoundary().end_s();
如果distance > 0说明障碍物在KEEP_CLESR前方
if (obstacle->IsBlockingObstacle() && distance > 0 &&
distance < (adc_length / 2)) {
keep_clear_blocked = true;
break;
}
障碍物是阻挡型的 && 障碍物在路口前方 && 距离很近(小于半个车长)
说明路口被阻挡了
if (!FLAGS_use_st_drivable_boundary) {
if (boundary.boundary_type() == STBoundary::BoundaryType::KEEP_CLEAR) {
if (CheckKeepClearBlocked(path_decision, *obstacle)) {
location = BELOW;
}
}
}
在KEEP_CLESR区域如果被阻挡,强制设为BELOW
CreateStopDecision函数
创建停车决策点
bool SpeedDecider::CreateStopDecision(const Obstacle& obstacle,
ObjectDecisionType* const stop_decision,
double stop_distance) const {
const auto& boundary = obstacle.path_st_boundary();
// TODO(all): this is a bug! Cannot mix reference s and path s!
// Replace boundary.min_s() with computed reference line s
// fence is set according to reference line s.
double fence_s = adc_sl_boundary_.end_s() + boundary.min_s() + stop_distance;
这块是有问题的,停车围栏位置应该是障碍物在参考线上的位置-stop_distance
但现在
adc_sl_boundary_.end_s():是基于参考线计算出来的
boundary.min_s():是基于路径规划出来的路径计算出来的
基准不同不能相加
const double main_stop_s =
reference_line_info_->path_decision()->stop_reference_line_s();
if (main_stop_s < fence_s) {
ADEBUG << "Stop fence is further away, ignore.";
return false;
}
main_stop_s:
- Apollo可能有多个停车决策来源
- 需要一个统一的、最优先的 停车位置
- 这个位置是所有停车决策中的最小值(最保守的)
- 如果已存在的停车位置 更早(s 值更小)
- 说明车辆需要在更近的位置停下
- 当前障碍物产生的停车决策是多余的
- 忽略当前障碍物的停车决策
const auto fence_point = reference_line_->GetReferencePoint(fence_s);
// set STOP decision
auto* stop = stop_decision->mutable_stop();
stop->set_distance_s(stop_distance);
auto* stop_point = stop->mutable_stop_point();
stop_point->set_x(fence_point.x());
stop_point->set_y(fence_point.y());
stop_point->set_z(0.0);
stop->set_stop_heading(fence_point.heading());
- 坐标转换
- 将参考线 s 坐标转换为世界坐标
- 获取停车点的完整信息(位置 + 航向)
- 创建 STOP 决策
- 初始化停车决策对象
- 设置停车参数
- distance_s:安全距离
- stop_point:停车位置 (x, y, z)
- stop_heading:停车航向角
CreateFollowDecision函数
创建跟车决策点
EstimateProperFollowGap函数
根据车速动态计算跟车距离
跟车距离 = 基础距离 + 速度 × 增长率
- 速度越快,跟车距离越大
- 低速时距离增长快,高速时增长慢
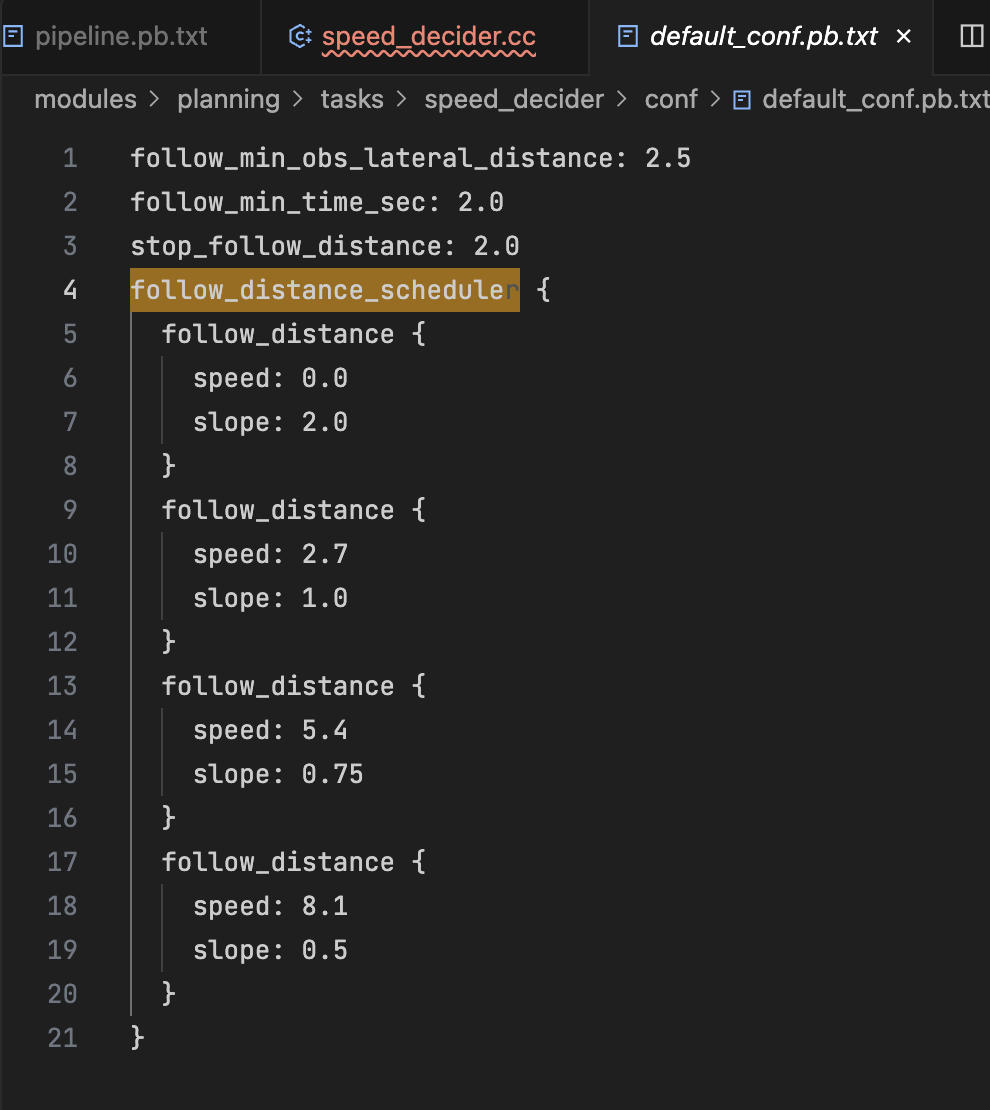
double follow_distance = config_.stop_follow_distance();
- 从配置中获取基础停车距离
- 默认值:2.0 米
- 这是速度为0时的最小跟车距离
for (const auto& follow_function :
config_.follow_distance_scheduler().follow_distance()) {
follow_distance_function_.emplace_back(
std::make_pair(follow_function.speed(), follow_function.slope()));
}
follow_distance_function_是从配置modules/planning/tasks/speed_decider/conf/default_conf.pb.txt
获取到的速度和斜率
for (i = 1 to 3) {
if (当前速度 <= 第 i 个速度点) {
// 计算当前区间的增量
follow_distance += 前一个斜率 × (当前速度 - 前一个速度点)
break
} else {
// 累加这个区间的完整增量
follow_distance += 前一个斜率 × (第 i 个速度点 - 前一个速度点)
}
}
if (当前速度 > 最大速度点) {
follow_distance += 最后一个斜率 × (当前速度 - 最大速度点)
}
const auto& boundary = obstacle.path_st_boundary();
const double reference_s =
adc_sl_boundary_.end_s() + boundary.min_s() + follow_distance_s;
跟车位置计算也是错误的,同样应该会障碍物在参考线上的位置-follow_distance_s
后续设置跟车决策点信息和设置停车决策点信息相似不再介绍
CreateYieldDecision函数
创建让行决策
const auto& obstacle_boundary = obstacle.path_st_boundary();
const double yield_distance_s =
std::max(-obstacle_boundary.min_s(), -yield_distance);
const double reference_line_fence_s =
adc_sl_boundary_.end_s() + obstacle_boundary.min_s() + yield_distance_s;
计算的让行位置也是错误的,同样是障碍物在参考线上的位置 + yield_distance_s,这里yield_distance_s是负数
后续设置让行决策点信息和设置停车决策点信息相似不再介绍
CreateOvertakeDecision函数
创建超车决策
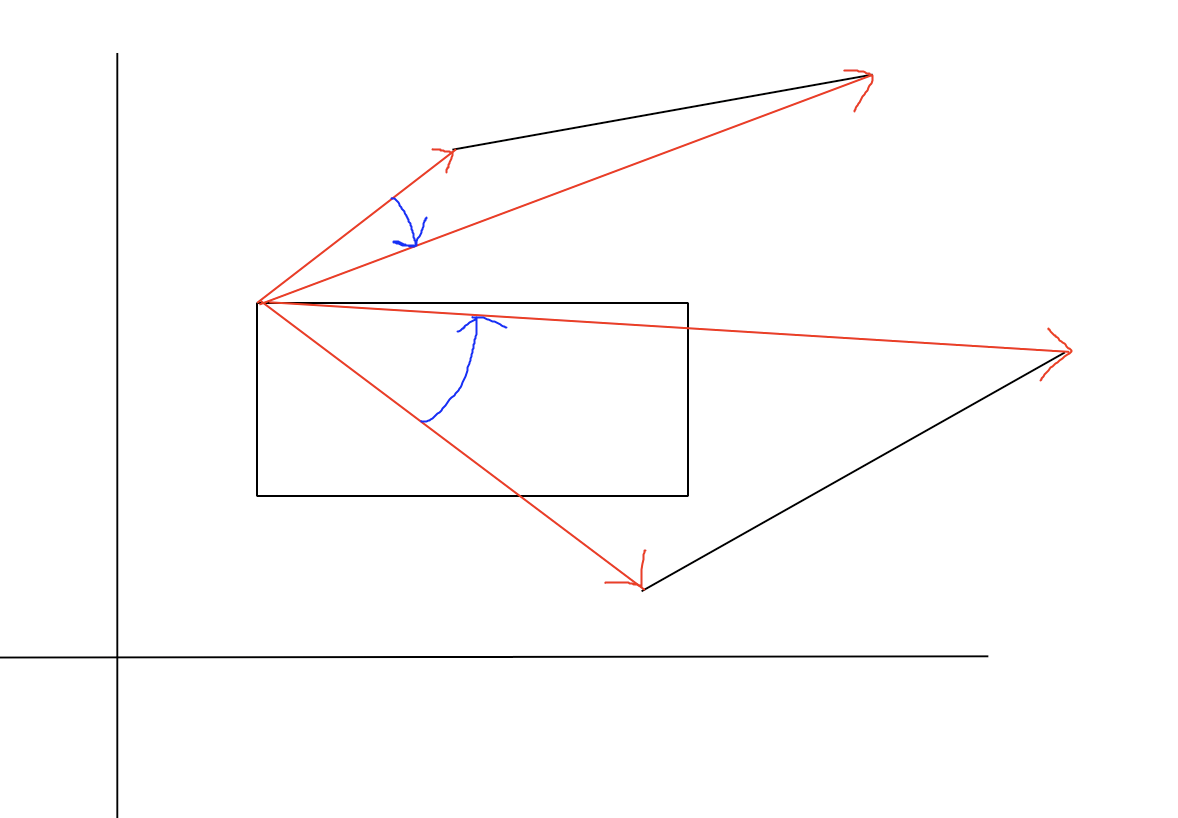
const auto& velocity = obstacle.Perception().velocity();
获取障碍物速度
common::math::Vec2d::CreateUnitVec2d(init_point_.path_point().theta())
创建自车前进方向的单位向量
Vec2d(velocity.x(), velocity.y())
创建障碍物速度向量
.InnerProd(Vec2d(velocity.x(), velocity.y()))
障碍物速度在自车前进方向上的投影分量
障碍物速度向量 v = (vx, vy)
自车方向单位向量 u = (ux, uy)
点积结果 = |v| × |u| × cosθ
= |v| × cosθ (因为 |u| = 1)
点积的几何意义
double overtake_distance_s =
EstimateProperOvertakingGap(obstacle_speed, init_point_.v());
double SpeedDecider::EstimateProperOvertakingGap(const double target_obs_speed,
const double adc_speed) const {
const double overtake_distance_s = std::fmax(
std::fmax(adc_speed, target_obs_speed) * config_.overtake_time_buffer(),
config_.overtake_min_distance());
return overtake_distance_s;
}
计算超车时需要保持的安全距离
超车距离 = max(最大速度 × 时间缓冲区, 最小距离)
后续设置超车决策点信息和设置停车决策点信息相似不再介绍
if (boundary.boundary_type() == STBoundary::BoundaryType::KEEP_CLEAR) {
ObjectDecisionType stop_decision;
if (CreateStopDecision(*mutable_obstacle, &stop_decision, 0.0)) {
mutable_obstacle->AddLongitudinalDecision("dp_st_graph/keep_clear",
stop_decision);
}
}
当规划的速度曲线位于 KEEP_CLEAR 区域下方时,生成停车决策,要求自车在 KEEP_CLEAR 区域边界前停车
else if (obstacle->IsStatic()) {
ObjectDecisionType stop_decision;
if (CreateStopDecision(*mutable_obstacle, &stop_decision,
-FLAGS_min_stop_distance_obstacle)) {
mutable_obstacle->AddLongitudinalDecision("dp_st_graph",
stop_decision);
}
}
当速度曲线位于静态障碍物下方时,生成停车决策,要求在障碍物前方 6 米(FLAGS_min_stop_distance_obstacle默认为6)处停车,确保安全距离
CheckIsFollow函数
const double obstacle_l_distance =
std::min(std::fabs(obstacle.PerceptionSLBoundary().start_l()),
std::fabs(obstacle.PerceptionSLBoundary().end_l()));
障碍物到参考线的最小横向距离
if (obstacle_l_distance > config_.follow_min_obs_lateral_distance()) {
return false;
}
如果障碍物的最小横向距离 > 2.5 米 → 障碍物不在自车车道内 → 不跟车
if (boundary.bottom_left_point().s() > boundary.bottom_right_point().s()) {
return false;
}
检测障碍物是否朝向自车运动(s 坐标随时间减小).如果是,说明是对向来车或倒车,不能作为跟随目标,直接返回false,不跟车
static constexpr double kFollowTimeEpsilon = 1e-3;
static constexpr double kFollowCutOffTime = 0.5;
if (boundary.min_t() > kFollowCutOffTime ||
boundary.max_t() < kFollowTimeEpsilon) {
return false;
}
检查障碍物是否在合理的时间范围内(min_t ≤ 0.5s 且 max_t ≥ 0.001s).如果障碍物太晚出现或太早消失,说明不在当前规划范围内,不跟车
if (boundary.max_t() - boundary.min_t() < config_.follow_min_time_sec()) {
return false;
}
检查障碍物在车道内持续的时间是否至少 2 秒。如果时间太短,说明障碍物可能是横穿车道或转弯离开,不能作为跟随目标
IsFollowTooClose函数
检查是否跟车太近
if (!obstacle.IsBlockingObstacle()) {
return false;
}
如果当前车道没有阻塞障碍物,返回false
if (obstacle.path_st_boundary().min_t() > 0.0) {
return false;
}
说明当前时刻,自车前方没有障碍物出现,>0说明在未来时刻有障碍物
const double obs_speed = obstacle.speed();
const double ego_speed = init_point_.v();
if (obs_speed > ego_speed) {
return false;
}
比较前车和自车的速度。如果前车速度大于自车速度,说明前车在远离,距离会越来越大,不存在追尾风险,无需检查跟车距离
const double distance =
obstacle.path_st_boundary().min_s() - FLAGS_min_stop_distance_obstacle;
FLAGS_min_stop_distance_obstacle:停车缓冲距离,默认是6m
distance:最小制动位置
v^{2} = v_{0}^{2}+2as
s=\frac{v^{2}-v_{0}^{2}}{2\left |a \right | }
double distance_numerator = std::pow((ego_speed - obs_speed), 2) * 0.5;
s=\frac{v^{2}-v_{0}^{2}}{2}
distance_numerator / distance_denominator
s=\frac{v^{2}-v_{0}^{2}}{2\left |a \right | }
distance < distance_numerator / distance_denominator;
实际距离 < 所需距离 → 太近
else if (CheckIsFollow(*obstacle, boundary)) {
// stop for low_speed decelerating
if (IsFollowTooClose(*mutable_obstacle)) {
ObjectDecisionType stop_decision;
if (CreateStopDecision(*mutable_obstacle, &stop_decision,
-FLAGS_min_stop_distance_obstacle)) {
mutable_obstacle->AddLongitudinalDecision("dp_st_graph/too_close",
stop_decision);
}
} else { // high speed or low speed accelerating
// FOLLOW decision
ObjectDecisionType follow_decision;
if (CreateFollowDecision(*mutable_obstacle, &follow_decision)) {
mutable_obstacle->AddLongitudinalDecision("dp_st_graph",
follow_decision);
}
}
}
在可以跟随的前提下,根据制动距离判断跟车安全性。如果距离太近(制动距离不足),生成停车决策避免追尾;如果距离足够,生成跟随决策实现自适应巡航
else {
// YIELD decision
ObjectDecisionType yield_decision;
if (CreateYieldDecision(*mutable_obstacle, &yield_decision)) {
mutable_obstacle->AddLongitudinalDecision("dp_st_graph",
yield_decision);
}
}
当障碍物不满足跟随条件,但仍影响自车行驶时,生成让行决策,要求自车减速让障碍物先通过
case ABOVE:
if (boundary.boundary_type() == STBoundary::BoundaryType::KEEP_CLEAR) {
ObjectDecisionType ignore;
ignore.mutable_ignore();
mutable_obstacle->AddLongitudinalDecision("dp_st_graph", ignore);
} else {
// OVERTAKE decision
ObjectDecisionType overtake_decision;
if (CreateOvertakeDecision(*mutable_obstacle, &overtake_decision)) {
mutable_obstacle->AddLongitudinalDecision("dp_st_graph/overtake",
overtake_decision);
}
}
当速度曲线从障碍物上方通过时,如果是KEEP_CLEAR 区域则生成IGNORE决策,否则生成超车决策
case CROSS:
if (mutable_obstacle->IsBlockingObstacle()) {
ObjectDecisionType stop_decision;
if (CreateStopDecision(*mutable_obstacle, &stop_decision,
-FLAGS_min_stop_distance_obstacle)) {
mutable_obstacle->AddLongitudinalDecision("dp_st_graph/cross",
stop_decision);
}
const std::string msg =
absl::StrCat("Failed to find a solution for crossing obstacle: ",
mutable_obstacle->Id());
AERROR << msg;
return Status(ErrorCode::PLANNING_ERROR, msg);
}
检测到速度曲线会撞上障碍物时,立即生成停车决策